Drone
Bringing up the Betaflight Bridge (and why I prefer two USB ports)
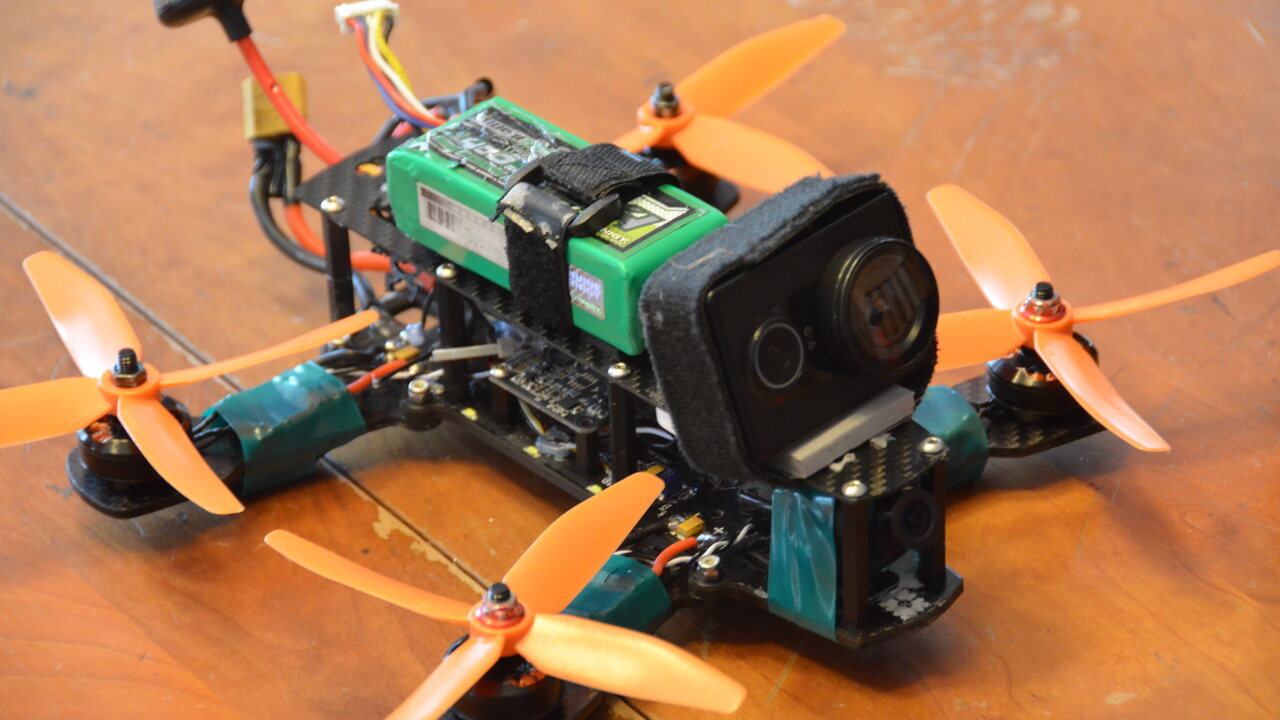
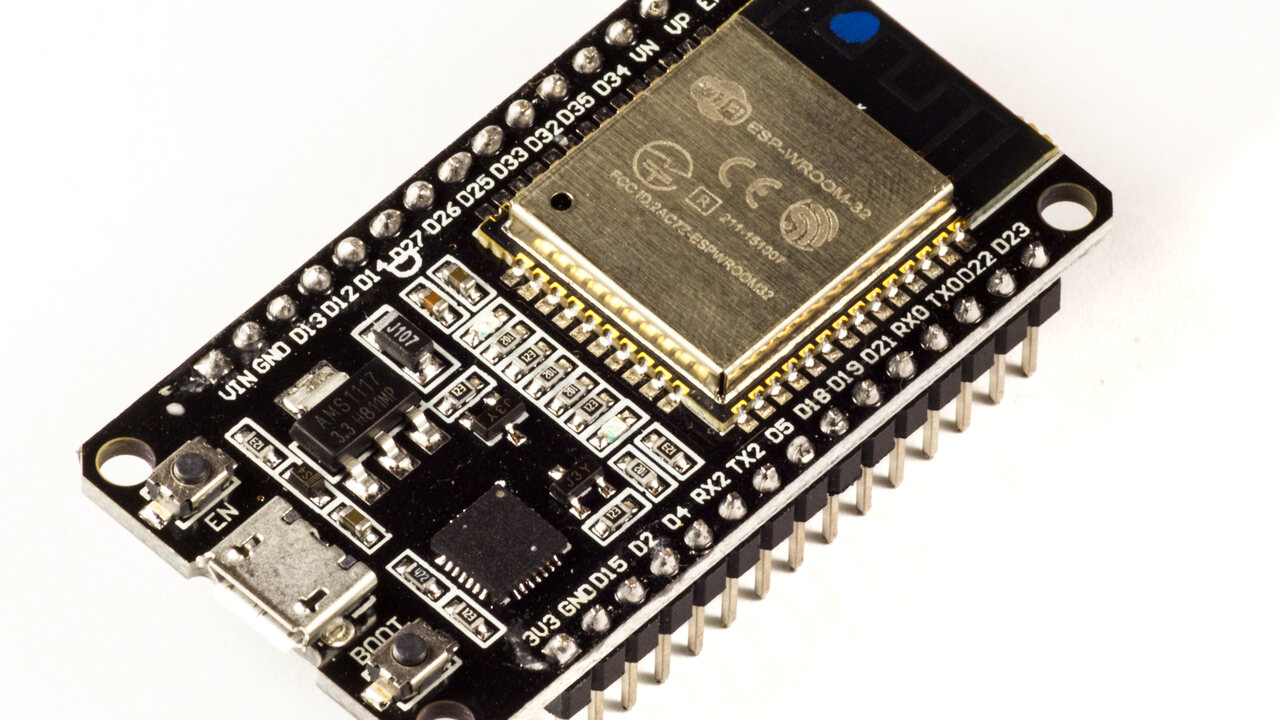
The Betaflight Bridge is a tiny ESP32-S3 that turns a flight controller's USB into a wireless link for the Betaflight App. Bringing it up taught me why two USB ports beat one: with a single port you can't debug the FC connection, and a second port makes field power as simple as a USB power bank.